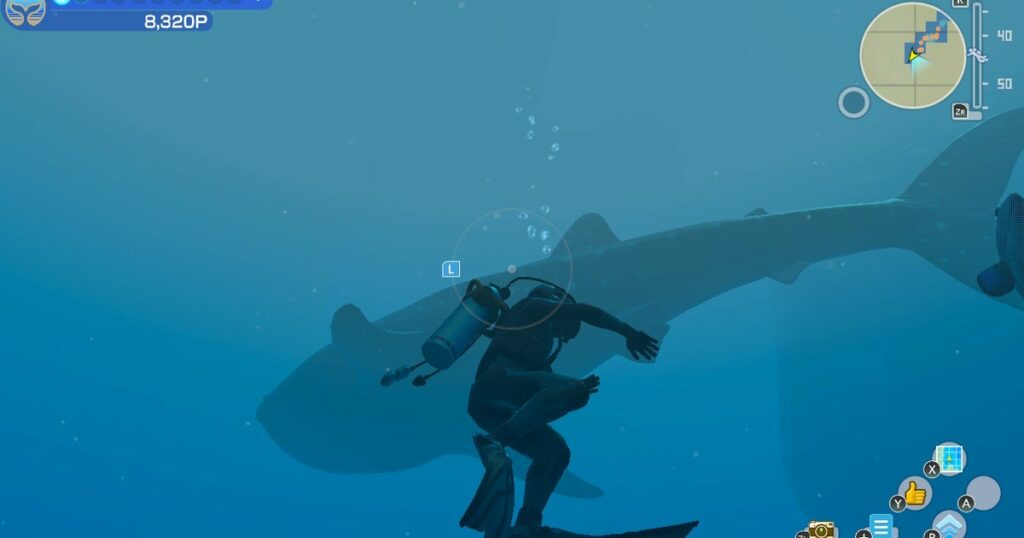
El robot domina el terreno mediante transiciones al caminar similares a las de los animales.
resumen: Los investigadores aprovecharon el aprendizaje por refuerzo profundo (DRL) para permitir que el robot cambiara su forma de andar de forma adaptativa, imitando movimientos animales como el trote y el galope, para atravesar terrenos complejos de manera efectiva. Su estudio explora el concepto de supervivencia (o prevención de caídas) como el principal impulsor de …